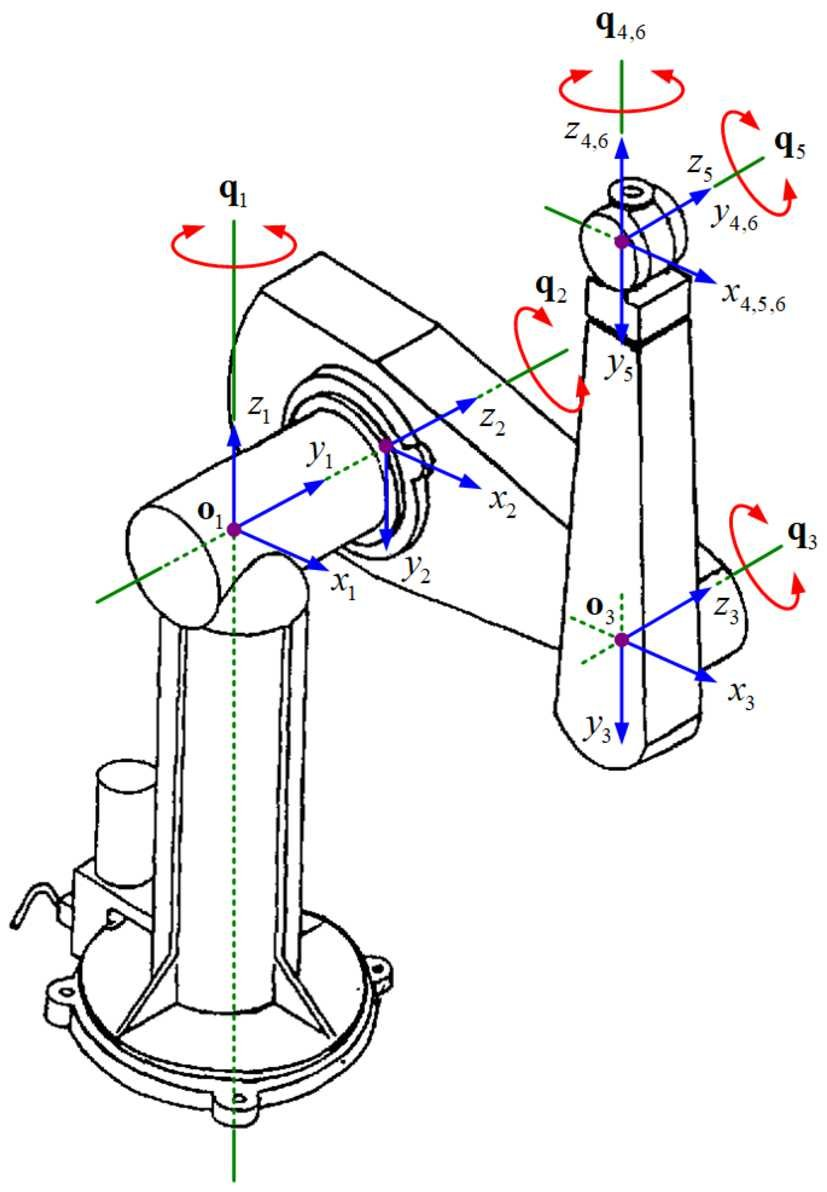
This project involves solving the forward and inverse kinematics for a PUMA 560 robotic arm manipulator. The Denavit-Hartenberg (DH) parameters were used to model the robot.
More details about this project will be added soon.