
Formulation of propulsion system requirements using resistance estimation and CAD modelling of a 1:75.5 scale Panamax Class single-screwed vessel.
Read More
Implementation of the guidance law described in the paper "Path following for marine surface vessels" for the case of fully actuated vessel CyberShip.
Read More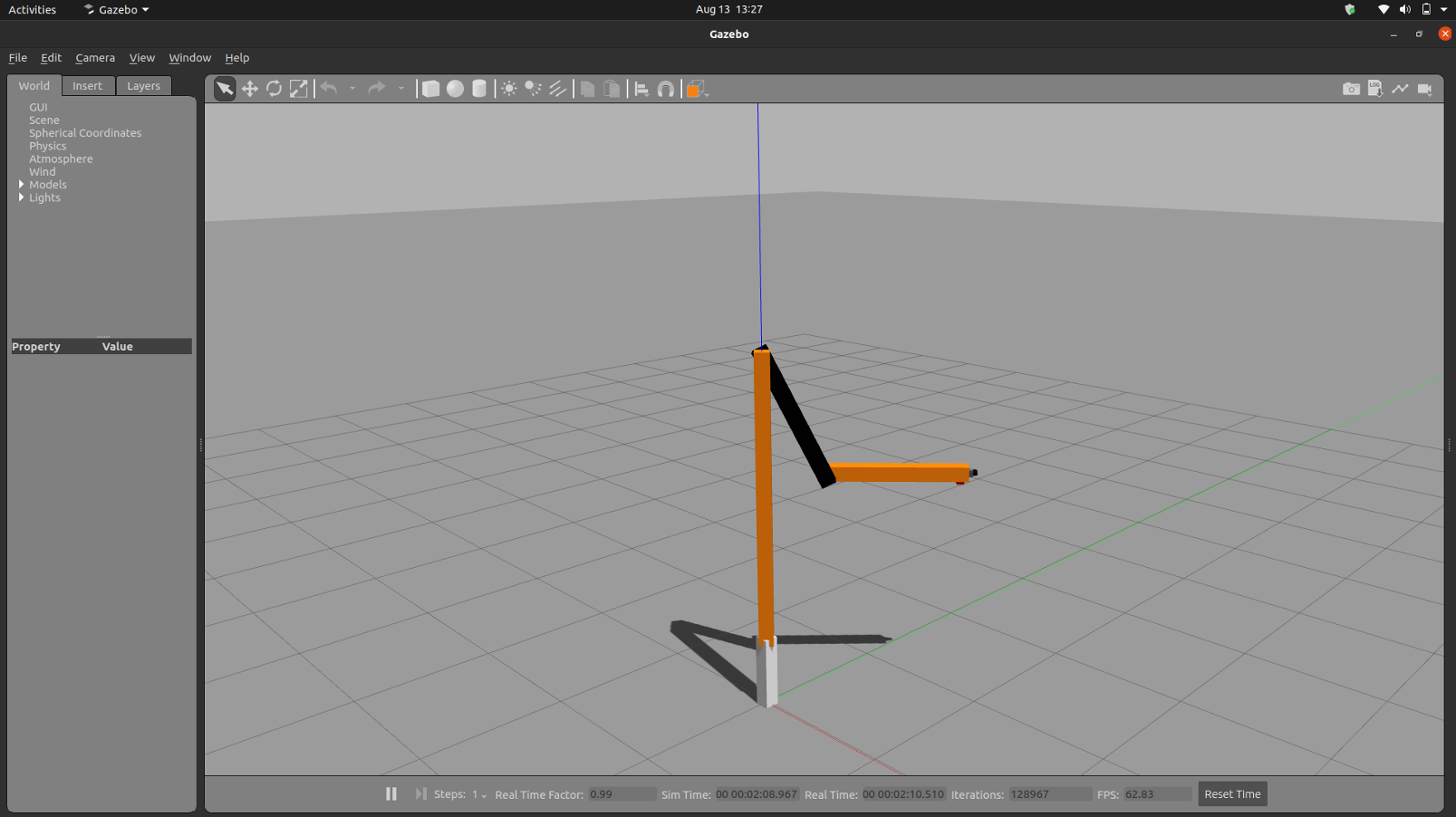
A 3DoF robotic manipulator was built and controlled in Gazebo by OpenCV using the Robot Operating System (ROS).
Read More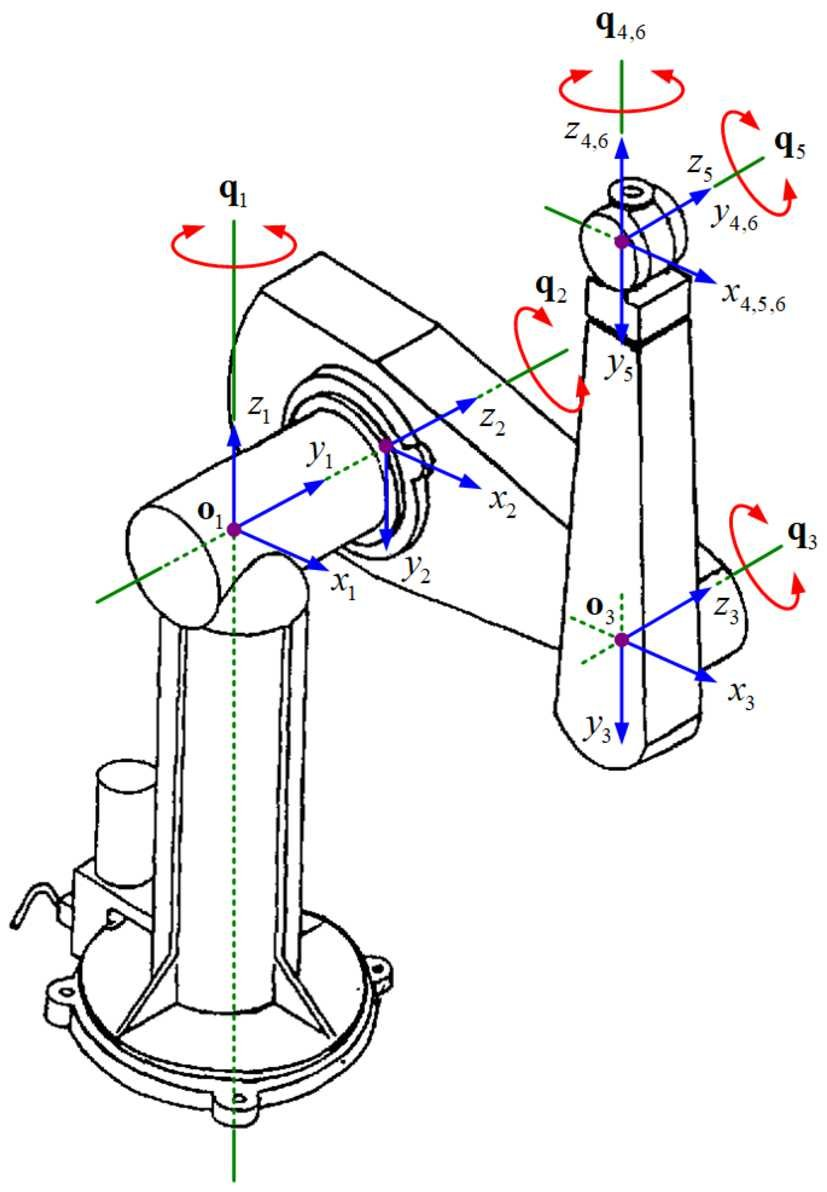
This project involves solving the forward and inverse kinematics for a PUMA 560 robotic arm manipulator. The Denavit-Hartenberg (DH) parameters were used to model the robot.
Read More